Hello Lidarviewers - i’m quite new to this and apologies if this has been asked before, but I just cannot get it working:
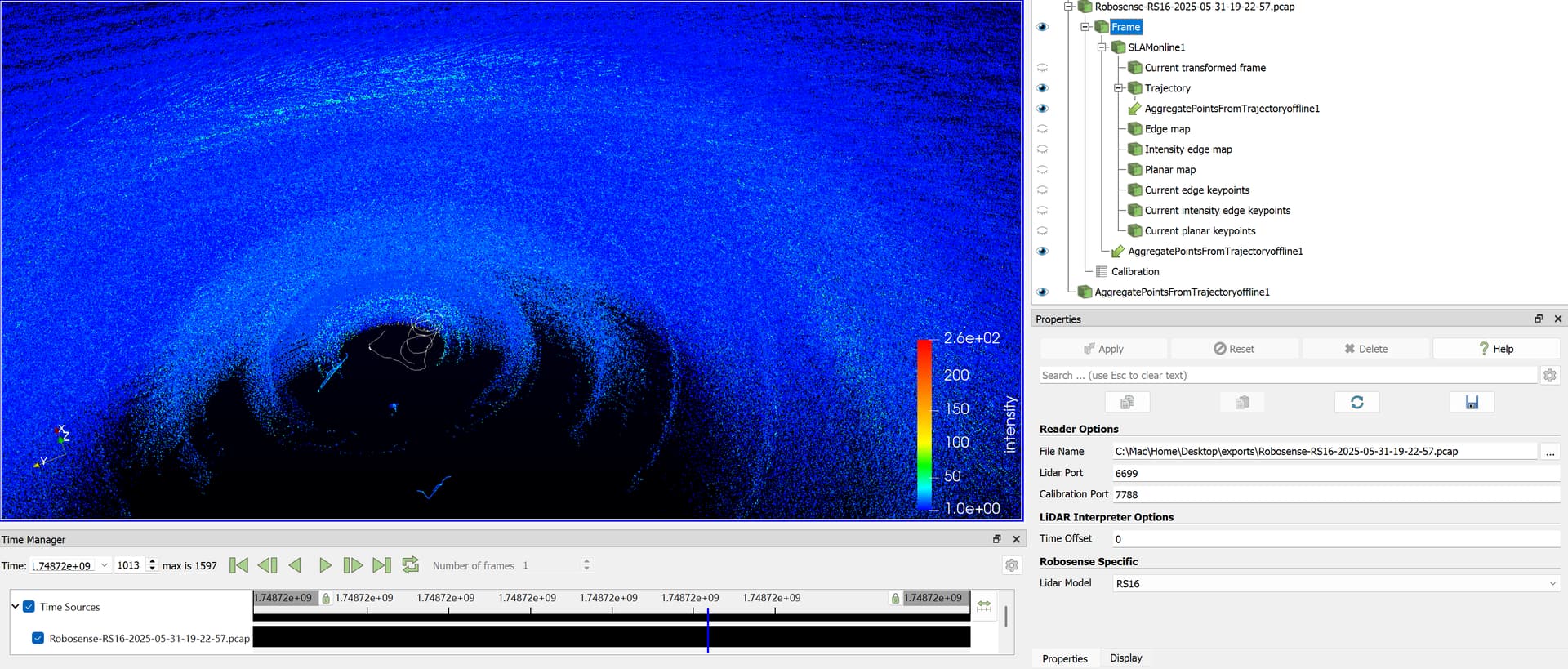
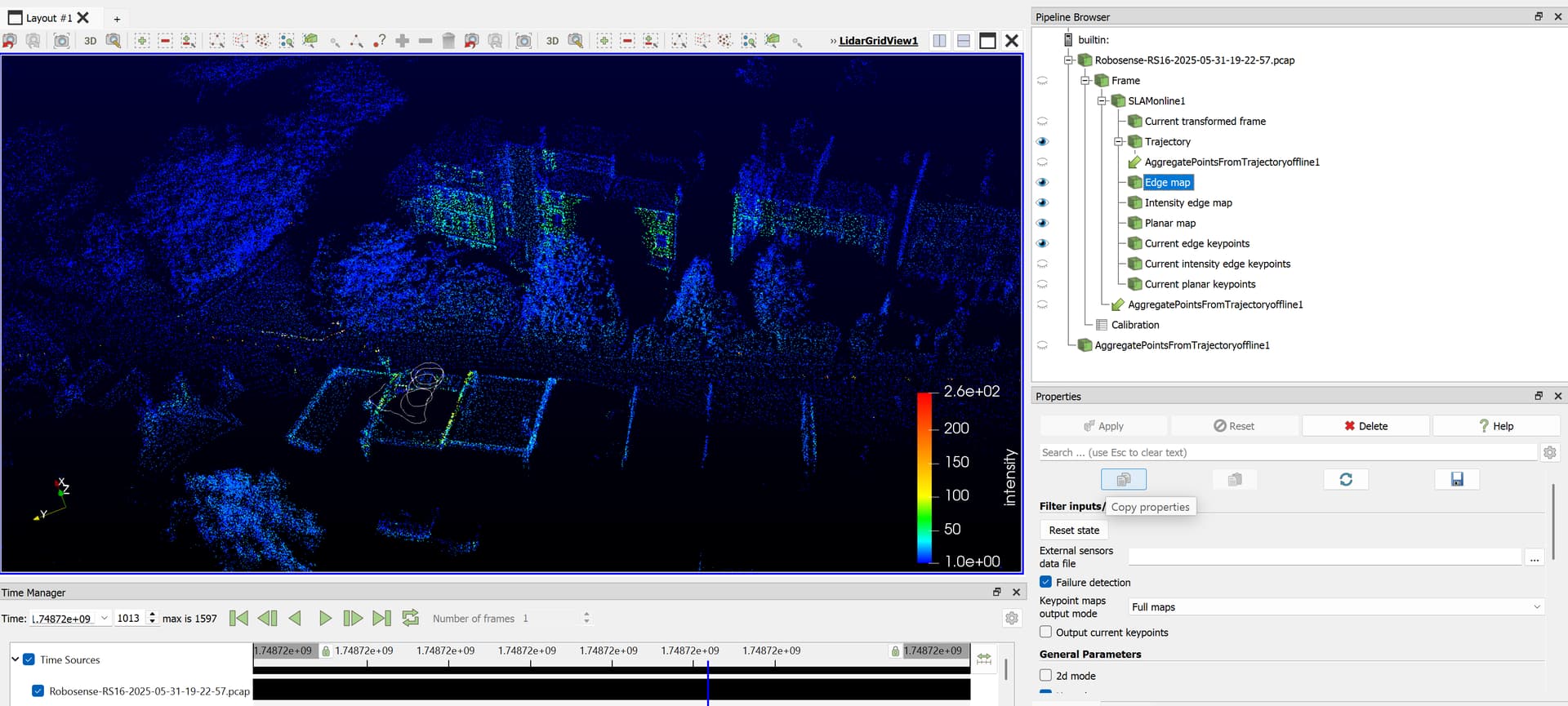
Im using a Robosense RS16 to SLAM a dense point cloud. with the Lidarview 5.1.0 the slam works absolutely perfect! the only thing that never seems to work in my setup is the aggregate points from trajectory to get the pointcloud more dense. adding screenshots of the SLAM and the aggregate point problem.
anyone here having similar issues? please help, if you know how to solve this.
Thank you for using LidarView and SLAM. I’m glad to hear that our SLAM algorithm is working well with your data.
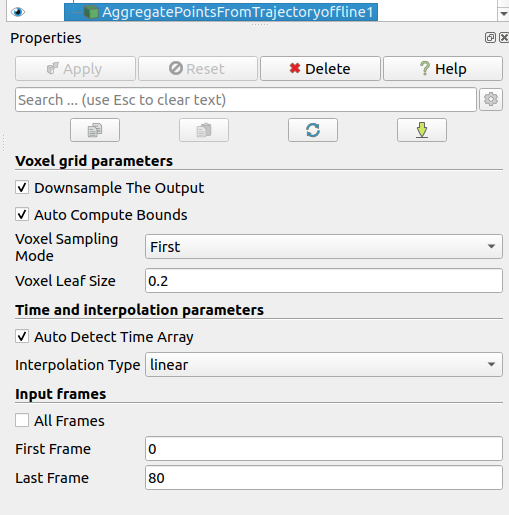
Regarding the issue with the offline aggregation filter: you need to configure the input frames by specifying both the first and last frame. If you don’t do this, the filter will attempt to aggregate all available frames. This can lead to incorrect results if the full trajectory isn’t available at the time of aggregation, as the final frames may not be processed correctly.
Thanks Tong Fu for helping me on this - much appreciated!
I have tried this, but the error still existst. It seems like it collects all the frames then adds them to the last selected frame.
Lets say, if I select 50 - 80, all points for the 30x frames are added to frame 80 only.
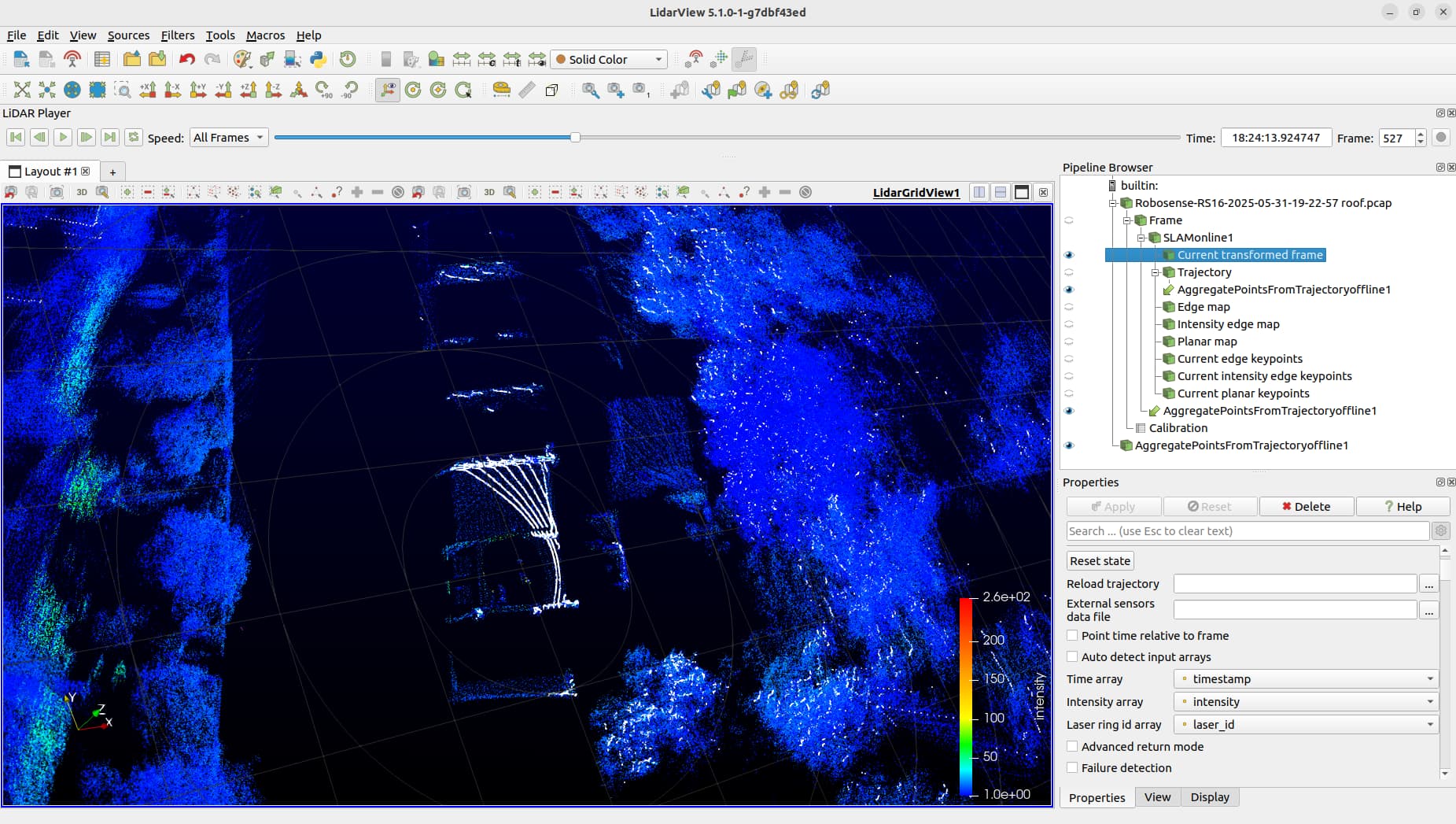
Is there something wrong with my time array or the way the pcap file is written?
Thank you for sharing your dataset. After taking some time to test the PCAP file, I did notice an issue with the timestamps. Specifically, the timestamps of the LiDAR points change with each replay.
This is problematic because the aggregation filter relies on consistent timestamps to interpolate the SLAM trajectory. If the timestamps of the trajectory and the LiDAR points are not aligned, interpolation cannot be reliably used to estimate the pose of each point.
We’ll look into whether this issue is coming from the Robosense interpreter. You can follow our investigation and progress on the related GitLab issue here