Hello Gatien,
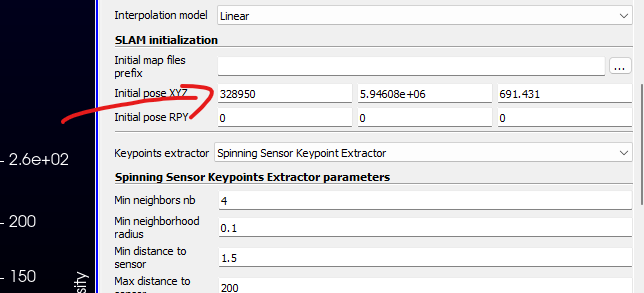
When I used poses and position of first point from IMU and GNSS to initialize the SLAM, it worked but the output looks messed up for some reason. There is some pattern.
Output looks like this:
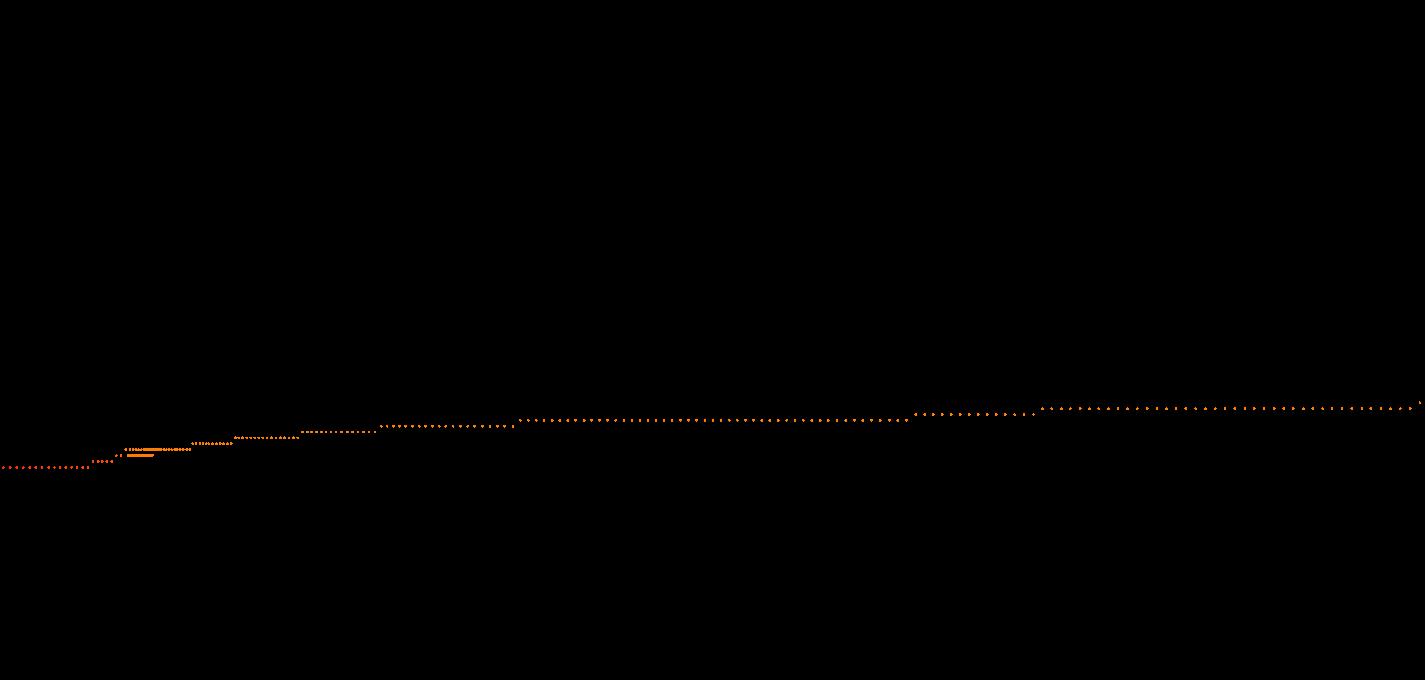
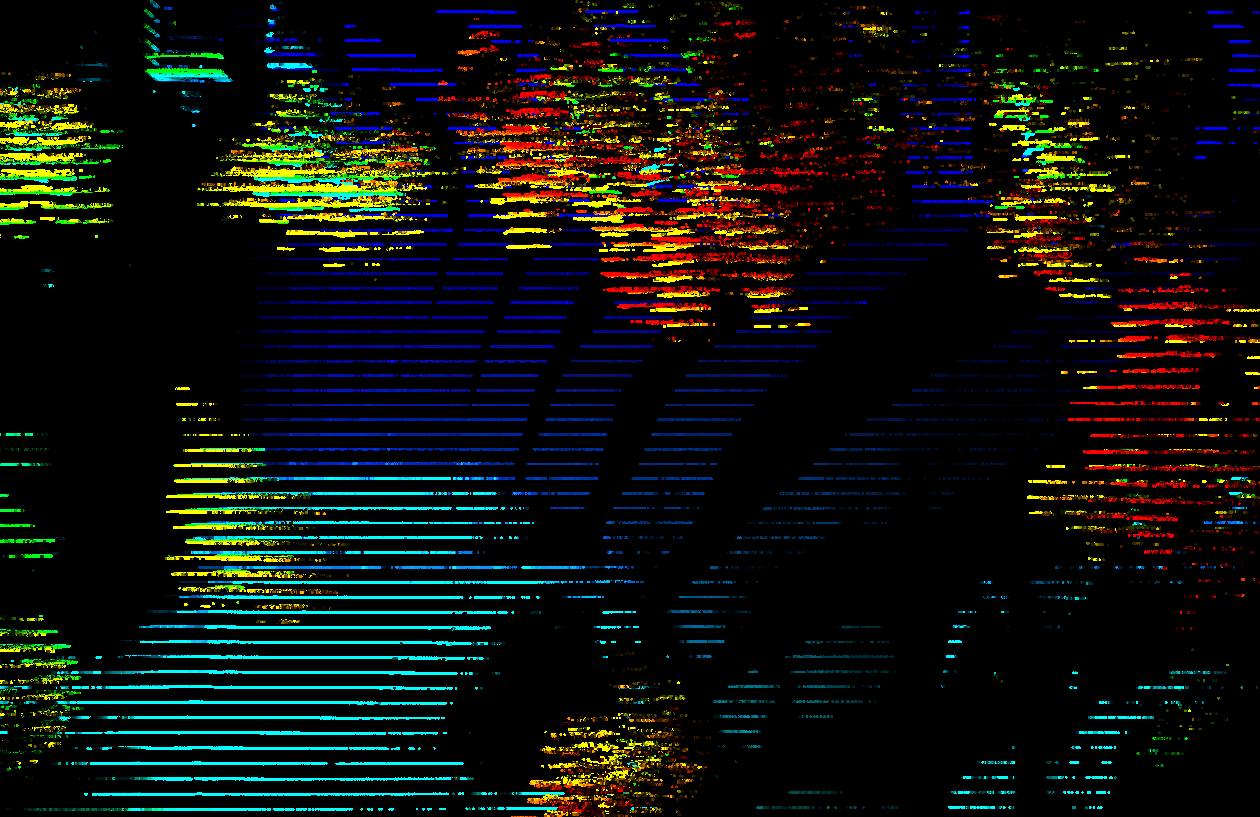
It has to do with the large coordinates or something but I am not sure if there is a fix for it.
Another question, when I added RPY to the initial pose, it produces bad output, is there a reason for that! I tried Yaw only and it improved a bit but it was still off.
Much appreciated.