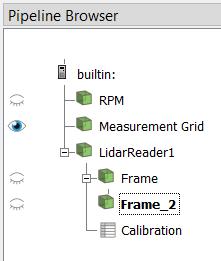
Hi all, I am new to lidarview development. I want a add a extra Frame in pipeline for my custom lidar which is using modified velodyne interpreter & it provides 2 set of point cloud data, Now i want to add extra Frame data in order to show second point cloud data. similar to below image. Any suggestions on how to implement ?
Hi @Raj1,
To incorporate a second Frame into the pipeline, you’ll have to modify the vtkLidarReader class by adding a second output to the vtk filter and updating the associated XML file LidarReader.xml. Afterwards, you’ll need to develop a new vtkLidarPacketInterpreter capable of handling two frames instead of just one. Keep in mind that these classes were initially designed to work with a single Frame, so this task may not be straightforward.
Another approach to achieving this, could be to modify your interpreter by introducing a scalar value that specifies which frame each point belongs to. Then, you can either create a new filter or utilize the Threshold filter to segment the point cloud based on that scalar value.
Hope this helps,
Timothée
Thanks @Timothee_Couble