I could use some help figuring out why LidarView is not recognizing GPS data contained in a .pcap file.
CONFIGURATION
The .pcap file was generated by a Velodyne VLP-16. The GPS used is a Garmin 18x LVC. The unit was configured according to the VLP-16 user manual. A Raspberry Pi is used to receive and store the .pcap file while the system is in flight.
ISSUE
During a test flight, the LiDAR data and the GPS data were successfully recorded as a .pcap file, but the GPS packet is not being recognized in LidarView.
Here are some screenshots demonstrating the issue…
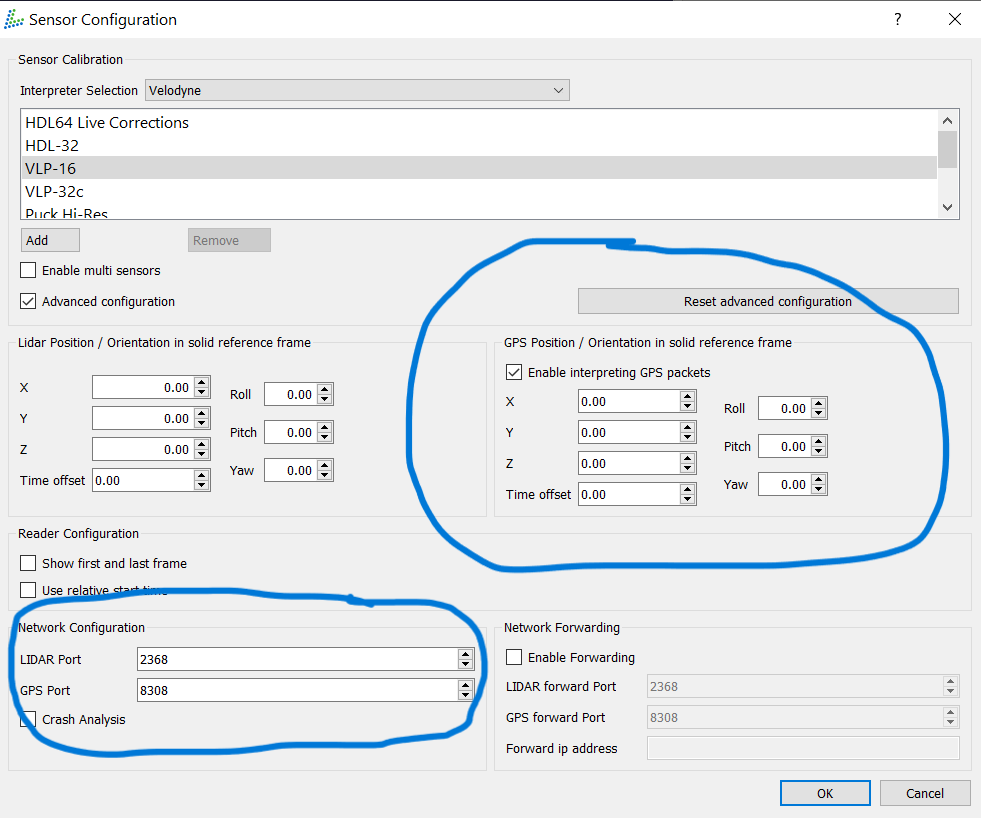
Screenshot 1: When opening the .pcap file in LidarView, the “Enable interpreting GPS packets” option is selected and the GPS port is kept as 8308.
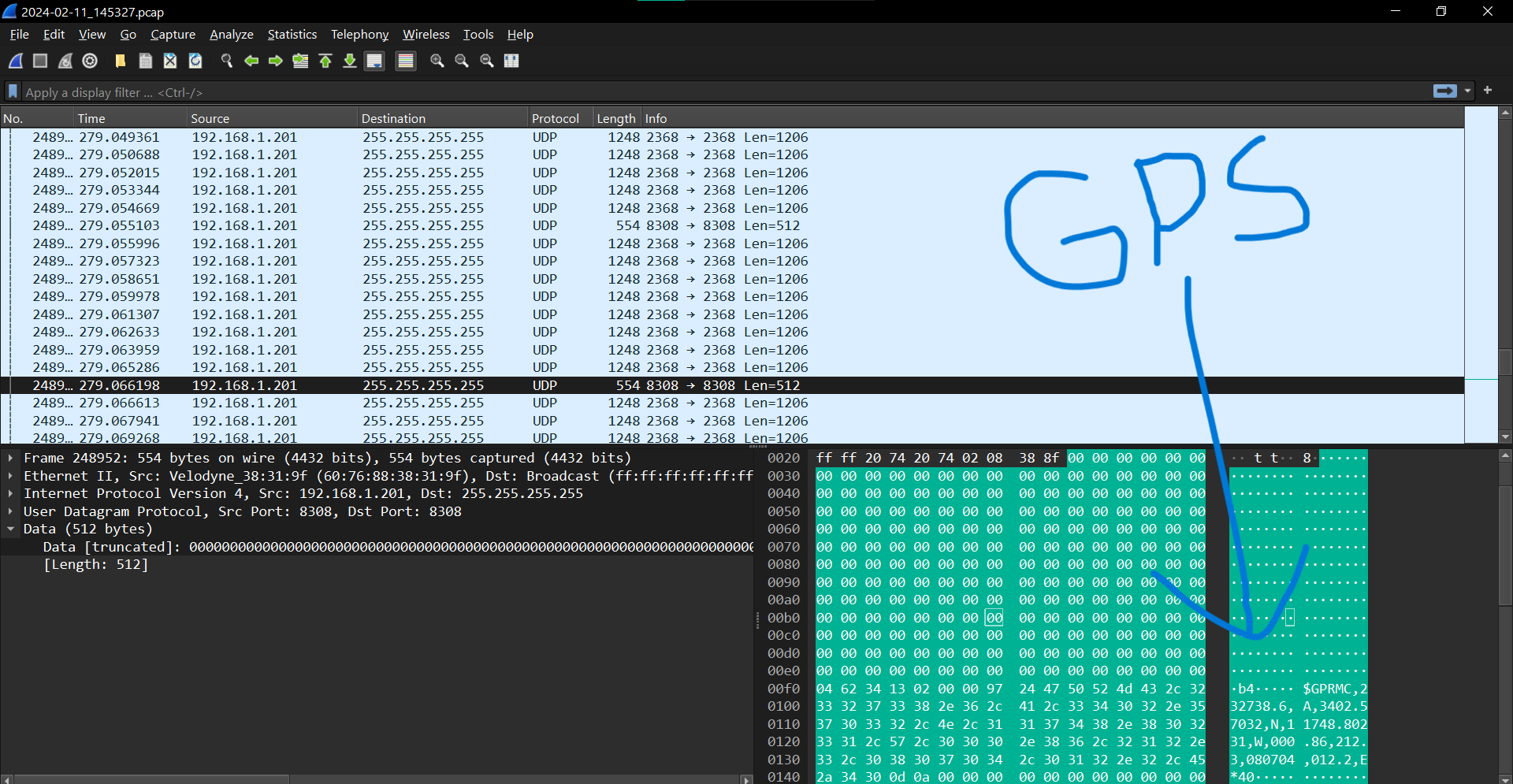
Screenshot 3: If the same .pcap file is opened in Wireshark, the GPS packets can be seen and the NMEA sentence can be read. This confirms that the .pcap file contains the GPS data.
So clearly, the GPS data has been recorded, but it seems like LidarView is not recognizing it. Thus, our LiDAR data cannot being geolocated.
Am I correct in thinking that the PositionOrientationReader should read the GPS packets in the .pcap file and interpret this data as the location of the LiDAR sensor?
Any help would be greatly appreciated! I am relatively new to LiDAR and ParaView, but I am eager to learn.
Hi @baldpixels, I cannot see any obvious mistake in what you have shown here, the data does indeed seem to be present and apparently correctly formatted.
Though it should be present in the Row data of the Position Orientation Reader ( but as it is the default view, you should have seen it if it was there)
Which LidarView version are you using ?
And would you be able to share your pcap file ( even a small portion of it ) ?
Hi @baldpixels , thanks for the recording. This actually highlight a bug occuring when no system mode indicator information is present in the GPS data with GPRMC ( but actually due to a wrong seperation of the checksum in the NMEA sentence parsing ) .
Though, according to the Garmin Spec, it seems this data should be present.
Please note though, LidarView does not handle georeferencing LiDAR from GPS reading for now, it only sets the read GPS data in the local coordinates (which in the case of your pcap extract stays equal to 0 as the GPS data is constant).
But this is something that could be developped by taking as input the output of SLAM (which can ingest GPS data in the form of output files for now, but live connection could also be possible) and GPS position ( assuming a known initial altitude and rotation matrix for the point cloud, which could be partly solved if a heading signal is available )