hello everyone … I have a Lidarview ver. 5 .when I start to recording data from velodyne 16 … it show me everything good … but after see the recoded file only show me the first view only … did not record all the views … i believe it in the sitting … could not found it …can anyone advice me . to record all the shown data ??
thanks
Hi @Emad66,
If I understand correctly, you only have the first frame (360° sweep) in your pcap file saved from the stream ?
What size is your pcap file ?
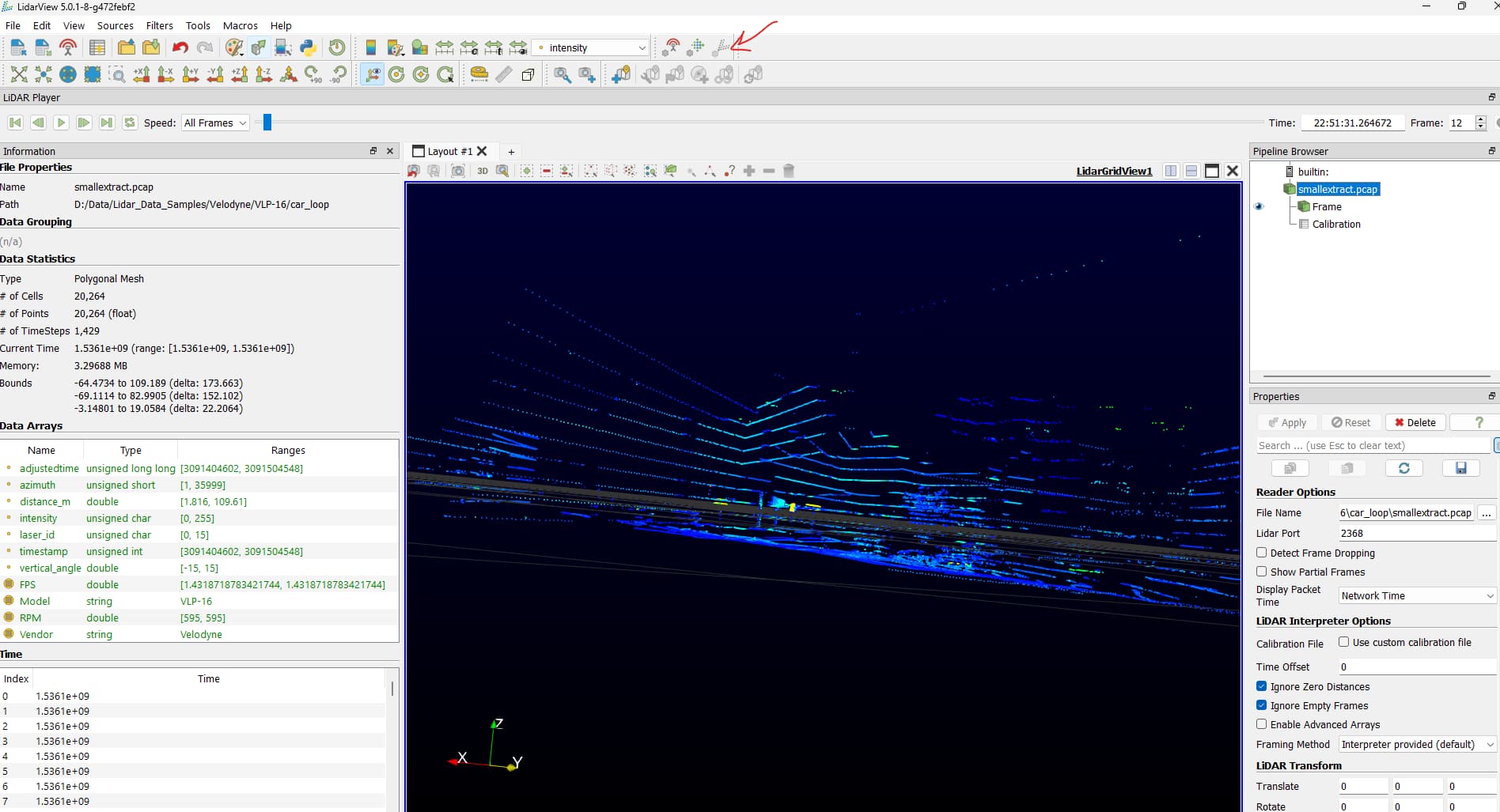
In the View-> Information tab, how many timesteps do you see ?
Note : The player requires to press the play button (it is not autoplay).
thanks for your answer …yes you understand correctly . i just press the red to record . for the display it view everything but after finished … I found only first frame … I know it is in settings or memory control … maybe the frame settings … I couldn’t solve it …
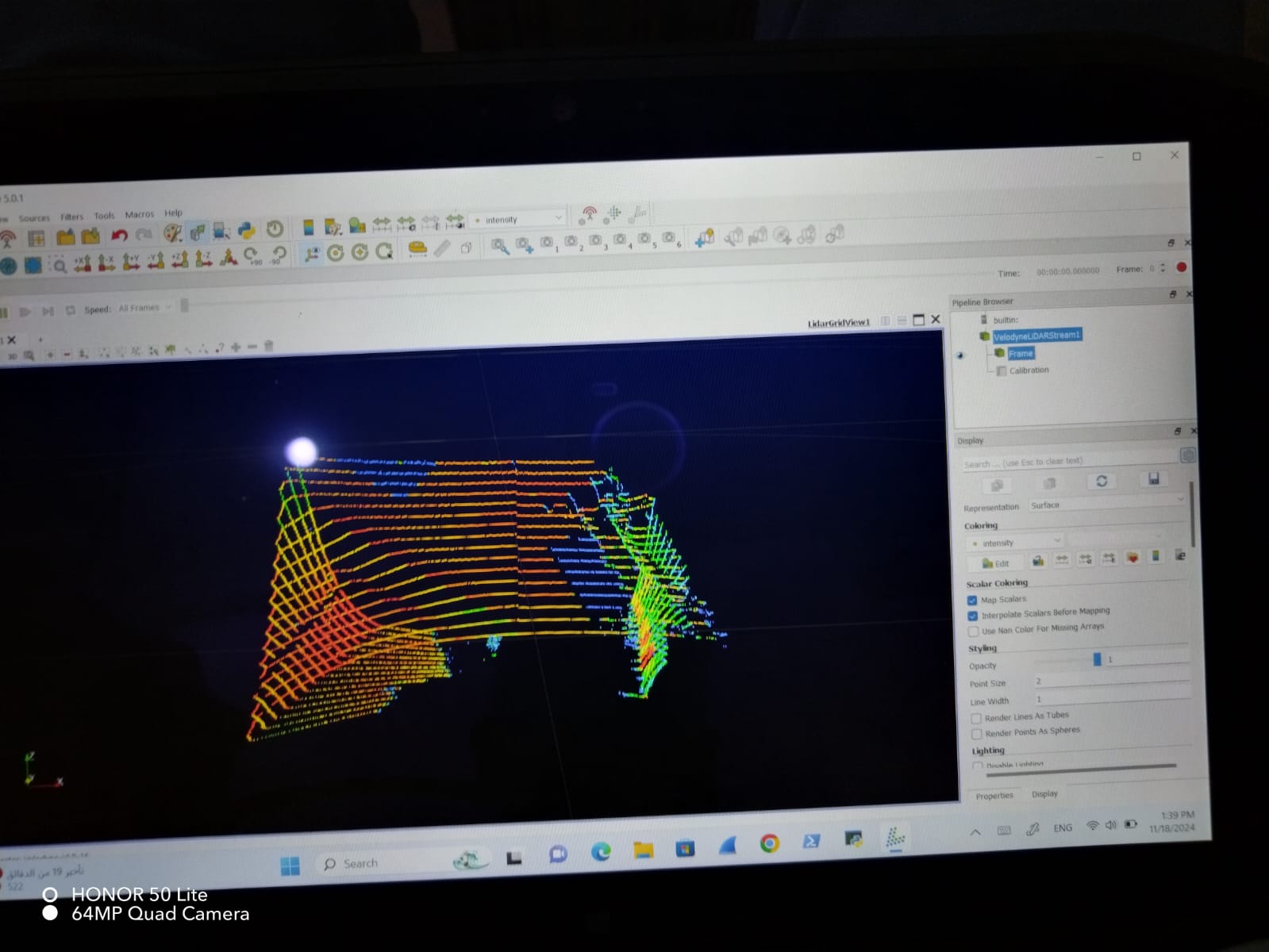
Well you are in Stream mode here, you need to open the saved pcap file to be able to replay it.
To save it, you need to press the red button to start the record, and press it again to stop it.
Then File-> Open Pcap file and browse to the saved file.
I hope this helps.
yes dear i am doing as you said and record … after i opened the Pcap file …found it record only the first area (frame) only not all the areas … did you get my point .
thanks a lot
Can you please share your pcap to check ?
I tried several time it is big ...

I did as you said . yes you are %100 correct , but .how to convert it to las or e57 file (point cloud)
do you know the steps .
many thanks
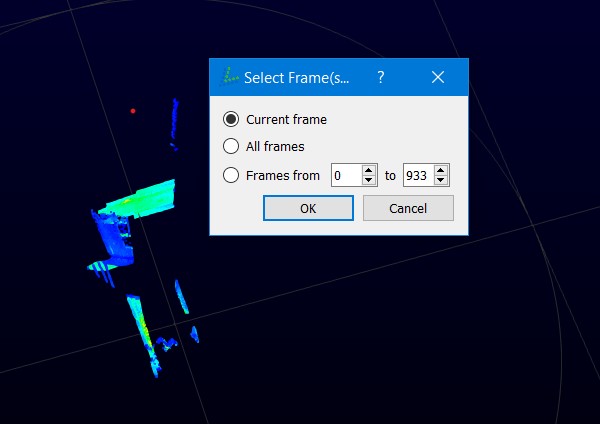
When I make save as LAS file what i have to make setting in photo …one more thing … how convert the points from spherical to cartesian coordinate (to be really points )
You can export each frame separately to a las file, with the interface you showed.
e57 export is not yet supported.
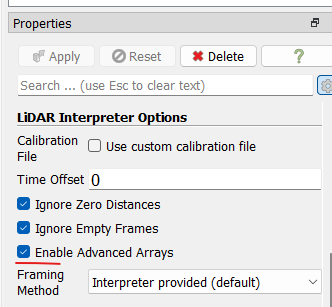
The data is already in cartesian coordinates when it is read and displayed (X,Y,Z data may be accessed directly when activating interpreters’ advanced arrays).
But I believe that you would like to reconstruct the environment in 3D and then export one point cloud of the whole acquisition.
To do that, you may use the SLAM library ( which is wrapped in LidarView). More info here
But your data is very challenging for SLAM algorithm as it has very fast motion with small inter frame overlap, so the algorithm will not likely work in those conditions without external sensors
Dear Gatien can I contact you directly by e-mail ?
I have sent you details to get in touch directly.
Dear Gatien i sent an e-mail to you .check please
thanks